Robot Calibration by SprutCAMの紹介
MachineMaker 2.0 を使用したロボットのキャリブレーション作業
ツールの位置に関するデータを MachineMaker 2.0 に自動的に転送するアプリ。
ロボット キャリブレーションは、次のタイプのロボットの TCP キャリブレーションをサポートします。
- ファナック
- クカ
- トーマック
- ボルンテ
- CRP
- デンソー
- ドボット
- エストゥン
- ヒウィン
- ヒュンダイ
- モトマン
- ニューカー
- マヌテック
- 那智
- OTCダイヘン
- トリノ
それがどのように働きますか:
- MachineMacker 2.0 で QR コードをスキャンして、アプリをプロジェクトにリンクします。
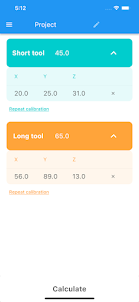
- ロボットの TCP データを収集します。最初は短いツールを使用し、次に長いツールを使用します。
- XYZ 読み取り値を入力します。スピンドルからの工具の突き出しの長さをミリメートル単位で入力します。
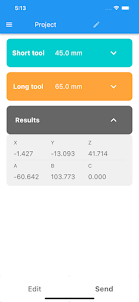
「計算」をクリックします
ツールの位置に関するデータを MachineMaker 2.0 に自動的に転送するアプリ。
ロボット キャリブレーションは、次のタイプのロボットの TCP キャリブレーションをサポートします。
- ファナック
- クカ
- トーマック
- ボルンテ
- CRP
- デンソー
- ドボット
- エストゥン
- ヒウィン
- ヒュンダイ
- モトマン
- ニューカー
- マヌテック
- 那智
- OTCダイヘン
- トリノ
それがどのように働きますか:
- MachineMacker 2.0 で QR コードをスキャンして、アプリをプロジェクトにリンクします。
- ロボットの TCP データを収集します。最初は短いツールを使用し、次に長いツールを使用します。
- XYZ 読み取り値を入力します。スピンドルからの工具の突き出しの長さをミリメートル単位で入力します。
「計算」をクリックします
表示