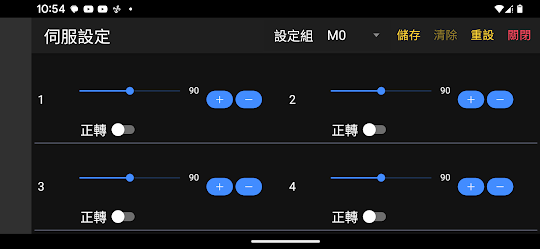
思頂跟隨車控制器の紹介
2023年の新フォーマット
前走車が線路を迂回して障害物を取り除く
後続車は一定の車間距離を保って前車に追従します
このアプリは、前の車を制御するためのBluetoothリモコンです
Arduino 側では CC2541 Bluetooth モジュールを使用することをお勧めします。
新しいバージョンのプロトコルでは、大量のデータを含む JSON テキストが使用されます。
Bluetooth 伝送速度 (ボーレート) は、38400 bps に調整することをお勧めします。
前走車が線路を迂回して障害物を取り除く
後続車は一定の車間距離を保って前車に追従します
このアプリは、前の車を制御するためのBluetoothリモコンです
Arduino 側では CC2541 Bluetooth モジュールを使用することをお勧めします。
新しいバージョンのプロトコルでは、大量のデータを含む JSON テキストが使用されます。
Bluetooth 伝送速度 (ボーレート) は、38400 bps に調整することをお勧めします。
表示